Gözcü İHA - YOLOv8 ile Gerçek Zamanlı Tank ve Zırhlı Araç Tespiti
Savunma sanayii için YOLOv8 tabanlı otonom tehdit tespit sistemi. Drone görüntülerinden tank ve zırhlı araçların gerçek zamanlı tespiti, OpenCV ile false positive filtreleme.
🎯 SAVUNMA SANAYİİ PROJESİ
Gözcü İHA - Otonom Tehdit Tespit Sistemi
YOLOv8 ile Gerçek Zamanlı Tank ve Zırhlı Araç Tespiti
|
YOLOv8
Nesne Tespiti
|
50
Epoch
|
RTX
GPU Eğitim
|
HSV
Renk Filtresi
|
1.1 Projenin Genel Amacı
Savunma sanayiinde İnsansız Hava Araçları (İHA) tarafından alınan görüntülerin işlenmesi ve tehdit unsurlarının (tank, zırhlı araç vb.) otonom olarak tespit edilmesi hedeflenmektedir.
🤖 AlgoritmaYOLOv8 (You Only Look Once) - En hızlı nesne tespit algoritmalarından biri |
🎯 HedefGerçek zamanlı Gözcü sistemi tasarımı ve false positive önleme |
2.1 Veri Seti ve Model Eğitimi
Modelin eğitimi için Roboflow platformu üzerinden temin edilen, kuş bakışı (drone view) çekilmiş tank ve zırhlı araç görselleri kullanılmıştır.
| Parametre | Değer |
|---|---|
| Model | yolov8n (nano) |
| Donanım | NVIDIA RTX 2060 GPU |
| Epoch | 50 |
| Image Size | 640x640 |
| Yöntem | Transfer Learning |
💻 Model Eğitim Kodu
# Source - Roboflow & Ultralytics Docs (Modified by Community)
from ultralytics import YOLO
from roboflow import Roboflow
if __name__ == '__main__':
# Veri setinin Roboflow üzerinden çekilmesi
# (API Key gizlenmiştir)
# Modelin Yüklenmesi (Nano Model)
model = YOLO('yolov8n.pt')
# Eğitimin Başlatılması
results = model.train(
data=f"{dataset.location}/data.yaml",
epochs=50,
imgsz=640,
device=0, # RTX 2060 GPU
batch=16,
name='gozcu_tank_modeli'
)
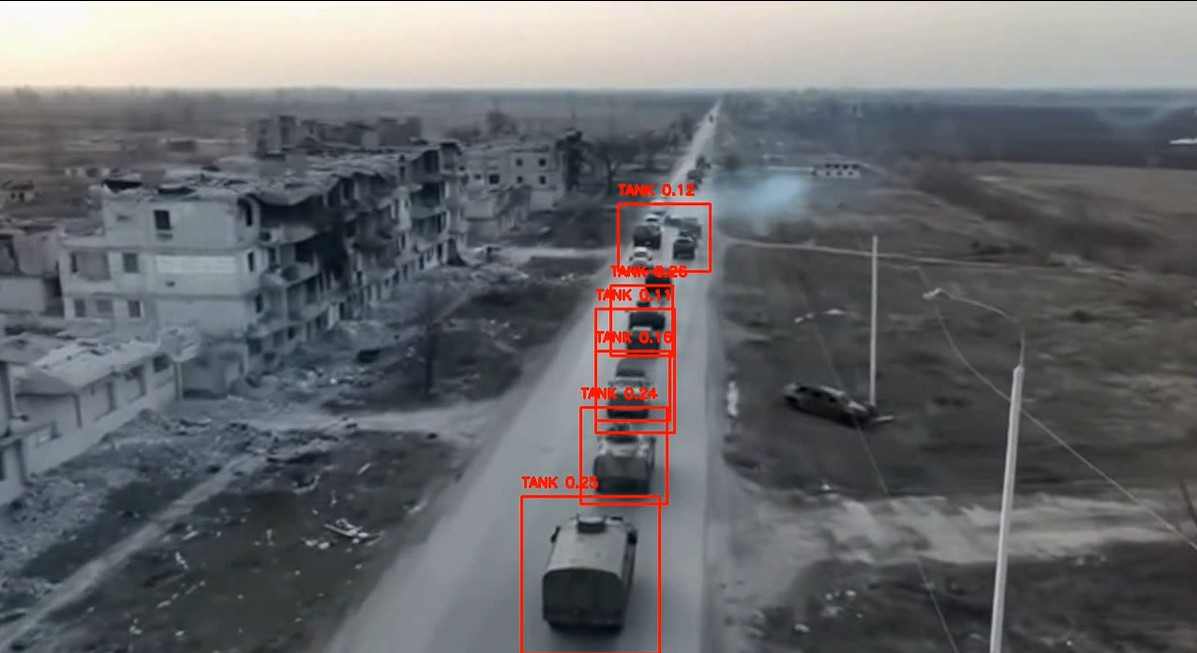
📊 Figure 1 - YOLOv8 Model Eğitimi ve Tespit Örneği
3.1 Karşılaşılan Zorluklar ve Filtreleme Algoritması
Eğitilen model test videosu üzerinde denendiğinde, geometrik yapısı tanklara benzeyen bazı sivil yapıların "False Positive" olarak algılandığı tespit edilmiştir.
🔍 Tespit Edilen Sorunlar:
- Yıkık binalar ve hurda araçlar tank olarak algılanıyor
- Beyaz renkli sivil araçlar tank sınıfına dahil ediliyor
✅ Çözüm: Post-Processing Katmanı
|
📐
Geometrik FiltrePiksel boyutlarına bakılarak tank boyutlarından çok büyük (bina) veya çok küçük (gürültü) nesneler eleniyor. |
🎨
Renk Filtresi (HSV)Parlaklığı yüksek ve doygunluğu düşük olan beyaz/gri sivil araçlar algoritma tarafından eleniyor. |
💻 Filtreleme Algoritması
# Source - StackOverflow (CC BY-SA 4.0)
import cv2
import numpy as np
# ... (Model tahmin kodları) ...
# 1. BOYUT FİLTRESİ
# Çok büyük (Bina) veya çok küçük nesnelerin elenmesi
if w > 250 or h > 250:
continue
if w < 25 or h < 25:
continue
# 2. RENK FİLTRESİ (HSV Analizi)
roi = frame[y1:y2, x1:x2]
hsv_roi = cv2.cvtColor(roi, cv2.COLOR_BGR2HSV)
# Parlaklık ve Doygunluk ortalaması
avg_brightness = np.mean(hsv_roi[:, :, 2])
avg_saturation = np.mean(hsv_roi[:, :, 1])
# Beyaz/Parlak sivil araçların elenmesi
if avg_brightness > 160 and avg_saturation < 60:
continue # Tespit iptal edilir4.1 Operasyon Sonucu ve Video Analizi
Yapılan filtreleme işlemleri sonucunda, sistemin sivil araçları ve binaları başarılı bir şekilde elediği, sadece hedef olarak belirlenen tank ve zırhlı araçları tespit ettiği görülmüştür.
🎥 Video Sonucu: Görüntü kalitesinin düşük olduğu veya hedefin kamufle olduğu durumlarda dahi model başarılı tespit yapabilmektedir.
🎬 Video 1 - Gözcü İHA Operasyon Görüntüsü
🛠️ Kullanılan Teknolojiler
|
🐍
Python |
🎯
YOLOv8 |
👁️
OpenCV |
🚀
Ultralytics |
📦
Roboflow |
🎮
NVIDIA CUDA |
İlgili Projeler
Tümünü Gör ->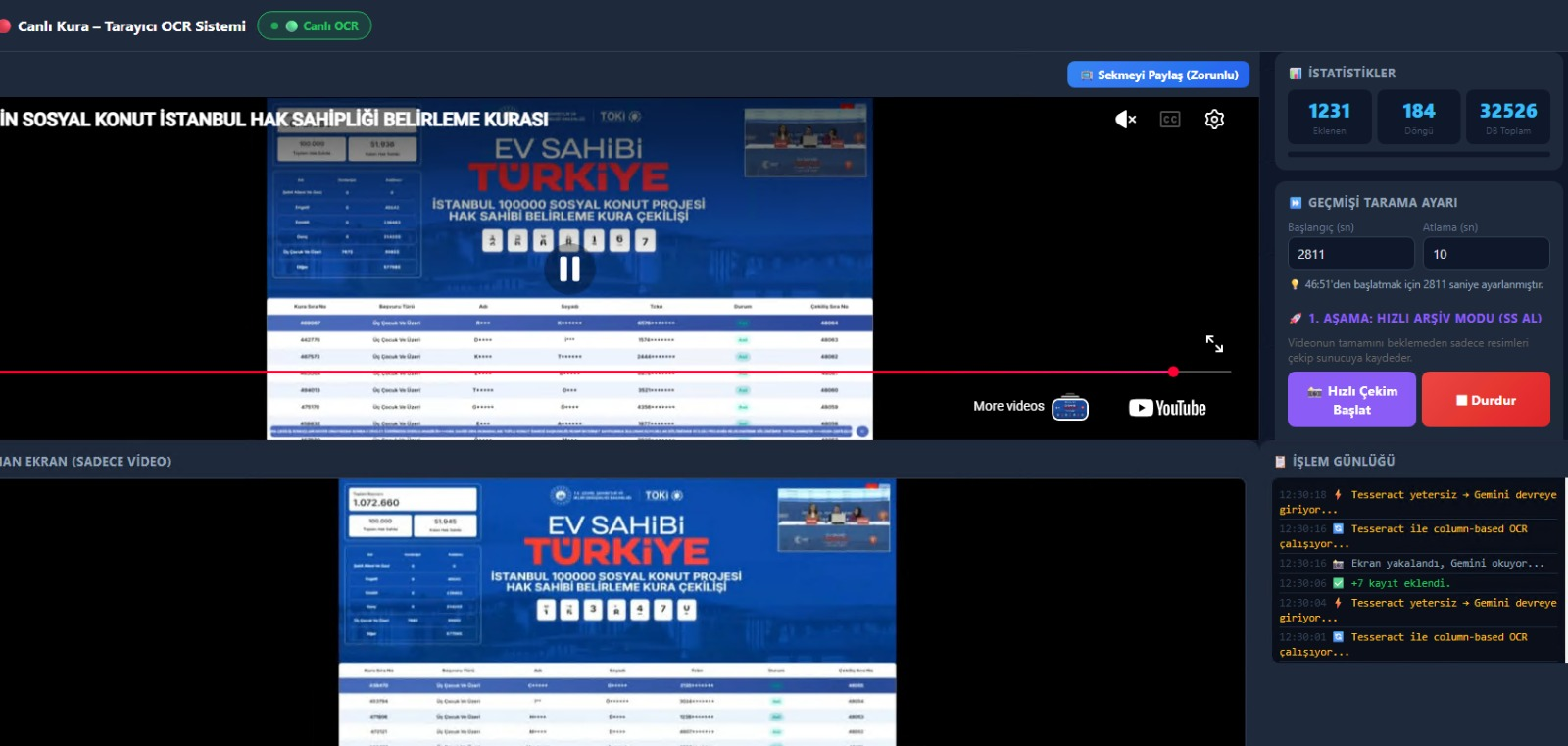
TOKİ 500.000 Konut Kura Sonuçları Platformu
500 bin konut kura çekilişinin canlı yayınından doğan, OCR ve yapay zeka teknolojisiyle geliş...
Projeyi Gör arrow_right_alt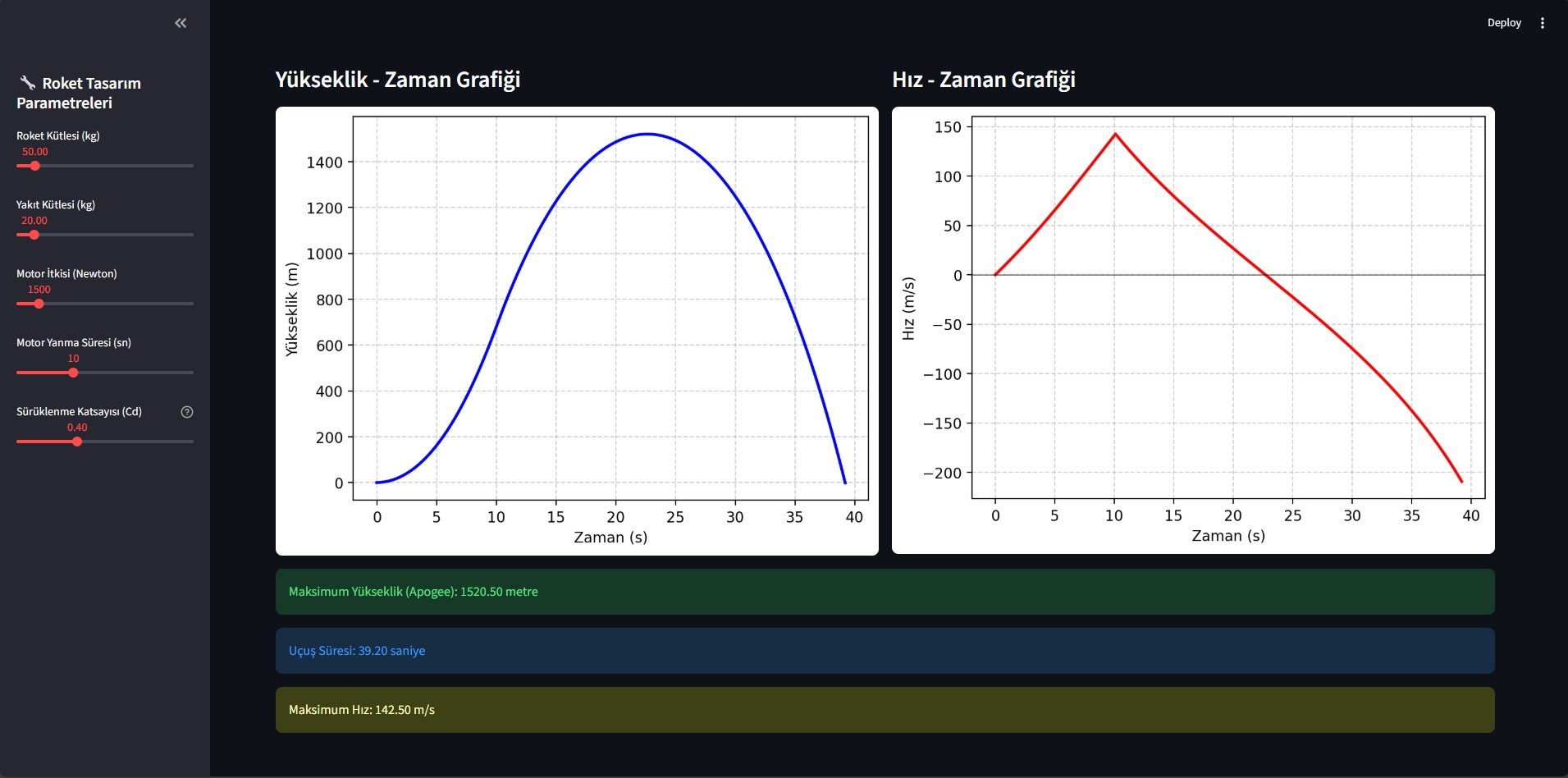
SkyTrace - Python Tabanlı Roket Yörünge Simülasyonu
Newton hareket yasaları ve aerodinamik sürüklenme prensipleriyle geliştirilen parametrik roket s...
Projeyi Gör arrow_right_alt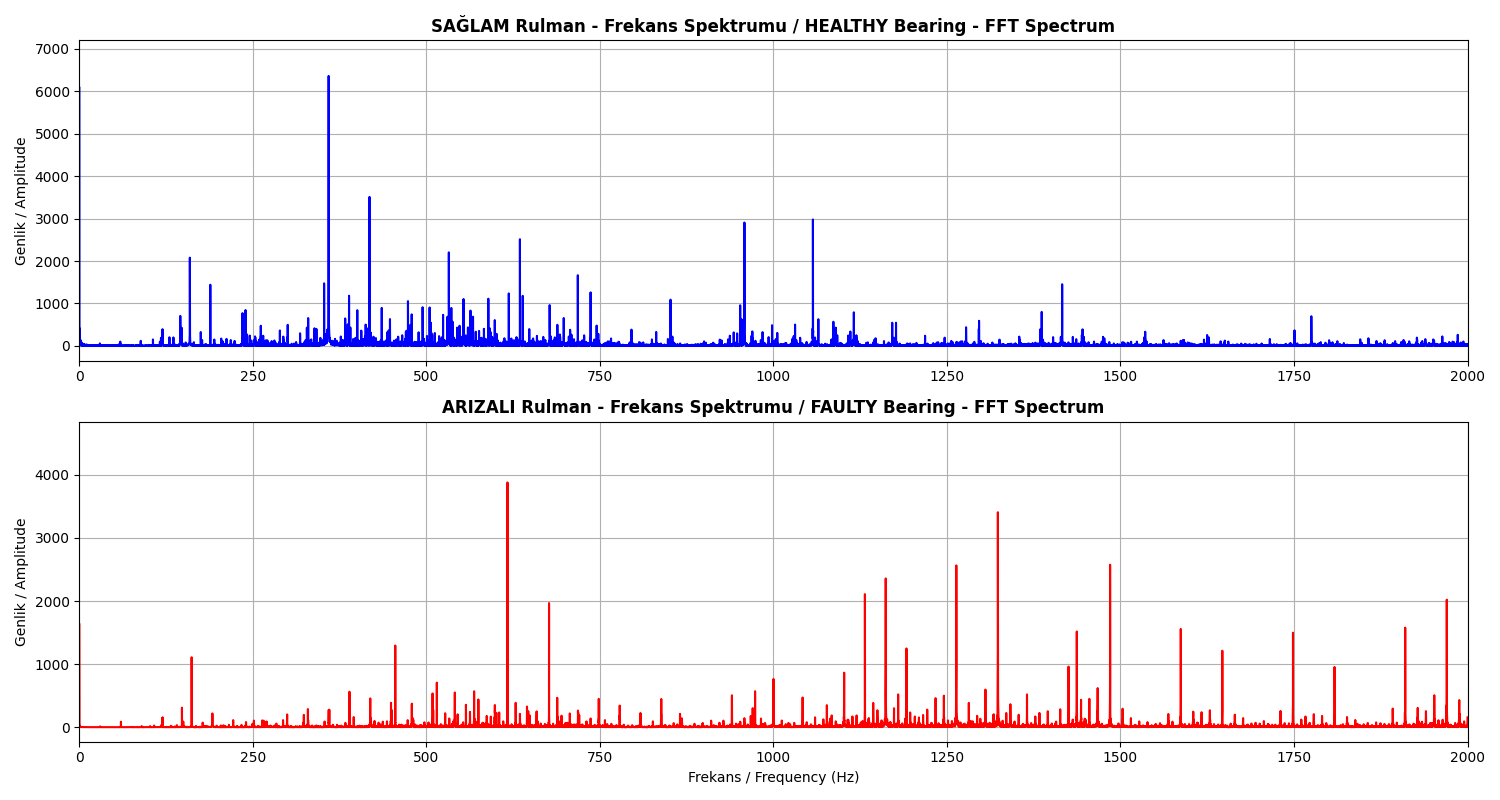
Rulman Arıza Tespiti - Kestirimci Bakım ve Makine Öğrenmesi Projesi
CWRU titreşim verileri kullanılarak rulman arızalarının FFT sinyal işleme ve Random Forest mak...
Projeyi Gör arrow_right_alt